
之江實驗室與浙大仿生技術成果刊《自然》雜誌 將為深海探索提供解決方案
香港文匯報訊 綜合中新社及澎湃新聞報道,3月4日,國際頂級期刊《自然》雜誌在封面刊發之江實驗室與浙江大學合作的研究成果--無須耐壓外殼,便能承受萬米級別深海靜水壓力的仿生深海軟體機器人,研究團隊在全球率先實現了軟體機器人的萬米深海操控及深海自主游動實驗,將為深海探索科考、環境監測與資源勘探提供解決方案。
之江實驗室智能機器人研究中心的高級研究專員李國瑞為該論文第一作者,之江實驗室智能機器人研究中心工程專員梁藝鳴為第二作者,浙江大學李鐵風為通訊作者,之江實驗室主任朱世強、顧建軍等為共同作者。
獅子魚構造帶來啟發
馬里亞納海溝是已知的海洋最深處,水壓高、溫度低、完全黑暗,被稱為「地球第四極」。而科研發現,在其6,000米-11,000米之間的極高壓深水區,仍有數百種物種生存,獅子魚就是典型代表。生物學研究發現,獅子魚的骨骼細碎狀分布在凝膠狀身體中,能承受近百兆帕的壓力,相當於約一噸的汽車壓在指尖上。
「獅子魚的構造帶給我們啟發,如果能將深海的『生命奧秘』化作『機器之力』,就可以研發出適應深海極端環境的仿生、軟體、小型化智能機器人。」李國瑞表示。仿生深海軟體機器人形似一條魚,長22厘米,翼展寬28厘米,約A4紙大小,原型來自於生活在馬里亞納海溝6,000米-11,000米深的獅子魚。
研究團隊對電子器件和軟基體的結構、材料進行力學設計,優化了在高壓環境下機器人體內的應力狀態。控制電路、電池等硬質器件被融入集成在凝膠狀軟體機身中;通過設計調節器件和軟體的材料與結構,機器人無須耐壓外殼便能承受萬米級別的深海靜水壓力。
動力方面,機器人靠自身攜帶的小型能源控制系統和兩翼中間橢圓形部位的介電彈性體人工肌肉實現推進。當硅膠體中的電子器件產生電信號,介電彈性體會在刺激下產生像肌肉一樣的變形模式,雙翼隨肌肉伸縮進行撲翼運動。為克服高壓、低溫條件下高分子材料的電驅動性能衰減,團隊研製了一種能適應深海環境的電驅動人工肌肉,在馬里亞納海溝的低溫(0℃-4℃)、高壓(110 兆帕)下依舊能正常工作。
現有深海機器人需高強度金屬保護
「總的說,仿生深海軟體機器人實現了兩項關鍵突破:適應深海靜水壓力的軟硬融合機器系統和適用於深海高壓低溫環境驅動的新型介電高彈體驅動器。」
李國瑞表示,為抵抗巨大的靜水壓力,現有的深海機器人均需高強度的金屬耐壓容器保護,仿生深海軟體機器人則可實現深潛器的小型化、柔性化、智能化,有望大幅降低深海探測的難度和成本。
仿生機器人在馬里亞納海溝穩定驅動
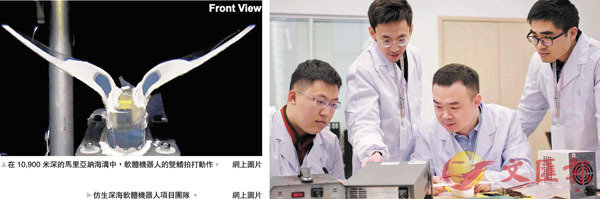
據介紹,2019年12月,仿生深海軟體機器人在馬里亞納海溝坐底,影像記錄顯示其在10,900米深處實現了穩定撲翼驅動。去年8月27日,機器人又在南海3,224米深處成功自主游動。
「我們的機器人在深海、極地、高衝擊性等惡劣及特種環境下有良好的應用前景。」
李國瑞表示,項目組將繼續研究深海軟體智能設備的能源、驅動、感知一體化系統,提升智能性,降低應用成本;還計劃將技術運用到深潛器上,研製小型化裝備,實現深海通訊、檢測等功能。
之江實驗室是浙江省政府、浙江大學、阿里巴巴共同舉辦的混合所有制新型研發機構,以重大科技任務攻關和大型科技基礎設施建設為主線,圍繞智能感知、智能計算、智能網絡、智能系統四個研究方向開展前沿基礎研究、關鍵技術攻關和核心系統研發。